お知らせNews
- 朝日航洋株式会社 TOPページ
- お知らせ
- 国土交通省「次世代社会インフラ用ロボット」の実証実験を行いました
お知らせ
国土交通省「次世代社会インフラ用ロボット」の実証実験を行いました
国土交通省が開発・導入を促進している「次世代社会インフラ用ロボット」の水中維持管理分野において選定された、
当社が開発に参加した下記2件の現場検証を実施しました。
今後は、現場検証で得られた結果をもとに、自動航行の高度化などの開発に取り組み、来年度以降の試行的導入を目指します。
■選定技術
(1)「自動航行ロボットを用いた河床の洗掘把握と河川護岸の概査システム」
代表者:朝日航洋株式会社(共同開発者:パナソニック株式会社AVCネットワークス社・国立研究開発法人国立環境研究所)
(2)「自動航行水上電磁波レーダー探査システム」
代表者:みらい建設工業株式会社(共同開発者:朝日航洋株式会社、株式会社メンテック、株式会社アートンシビルテクノ、株式会社シーラム)
■現場検証の内容
日時:10月22日(木)・23日(金)・28日(水)
場所:信濃川 妙見堰(新潟県長岡市妙見町)
実施内容:水中点検(コンクリートの損傷や堆積状況の把握)の検証
■システムの概要
(1)「自動航行ロボットを用いた河床の洗掘把握と河川護岸の概査システム」
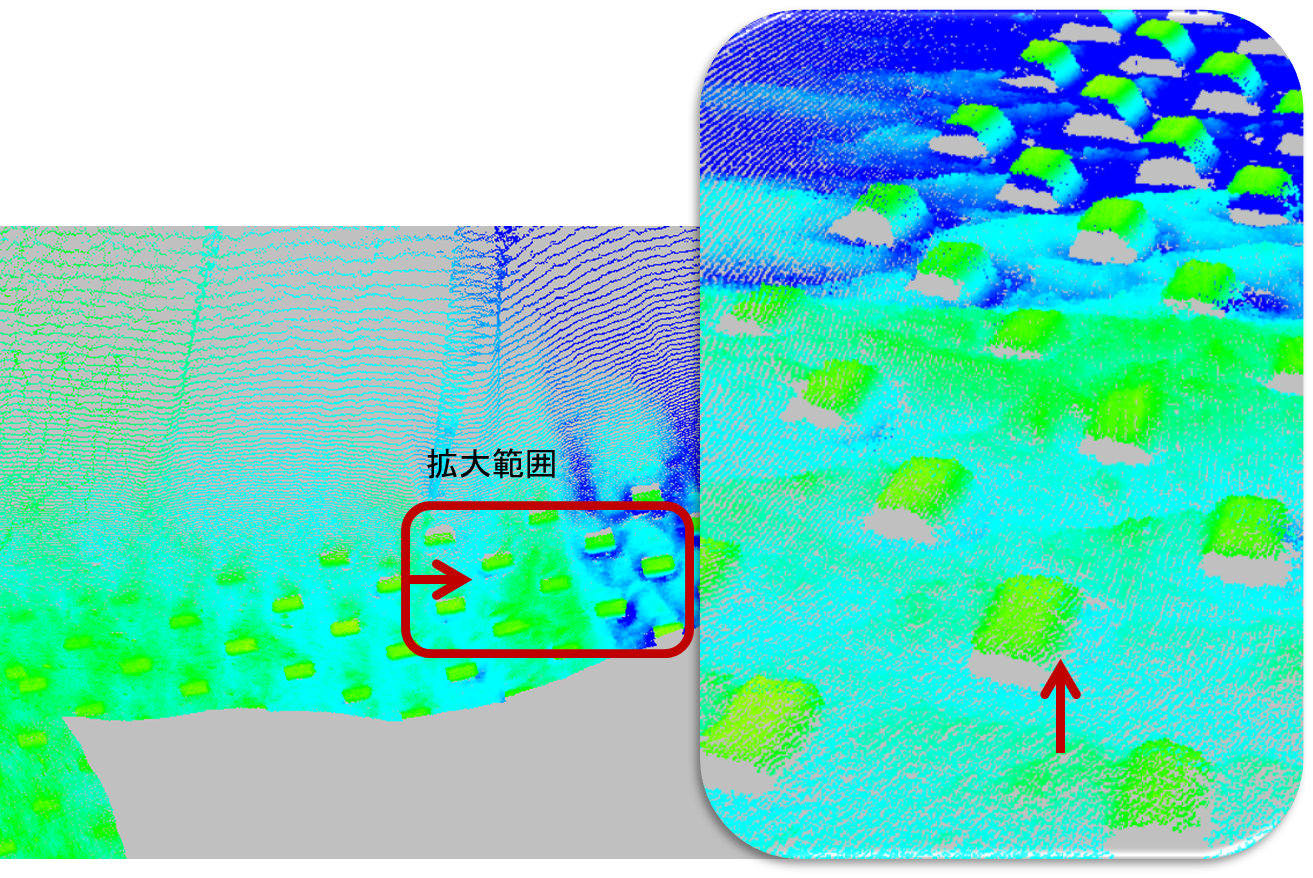
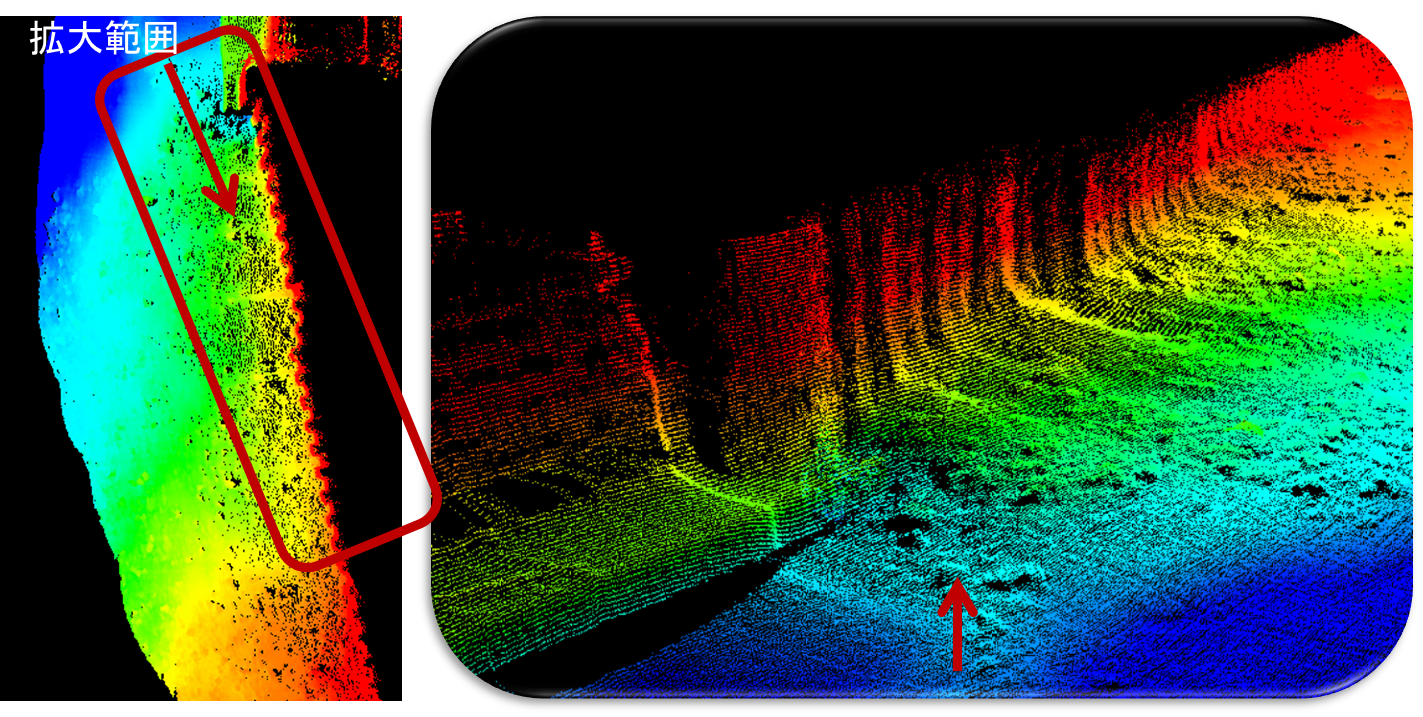
自動航行及び点検対象物への正対制御ができる船体に、音響測深機・ビデオカメラ(陸上及び水中)を搭載し「河床の洗掘把握」と「河川護岸の概査」を効率的に行うシステムです。
音響測深機から三次元地形モデルを取得し、ビデオカメラで撮影した画像には鮮明化・モザイク処理を施し、これらを組み合わせて「三次元展開図」を作成することで、従来よりも容易に面的な性状把握と経年比較を可能にします。
(2)「自動航行水上電磁波レーダー探査システム」
当社が開発した自動航行船で電磁波探査機搭載台船を曳航し、「河川護岸の空洞」と「河床の洗掘把握」を水上から行うシステムです。従来は陸上から行っていた電磁波探査を水上から行うことで、より効率的な探査を実現します。


(本件に関するお問い合わせ先)
朝日航洋株式会社 営業一部 公共グループ 杉山
TEL 03-3988-1013
(報道機関からのお問い合わせ先)
朝日航洋株式会社 企画室 広報担当
TEL 049-245-2548